






| Teile | Massen in g | Massen in g |
| Kohleverb. | Stahlverb. | |
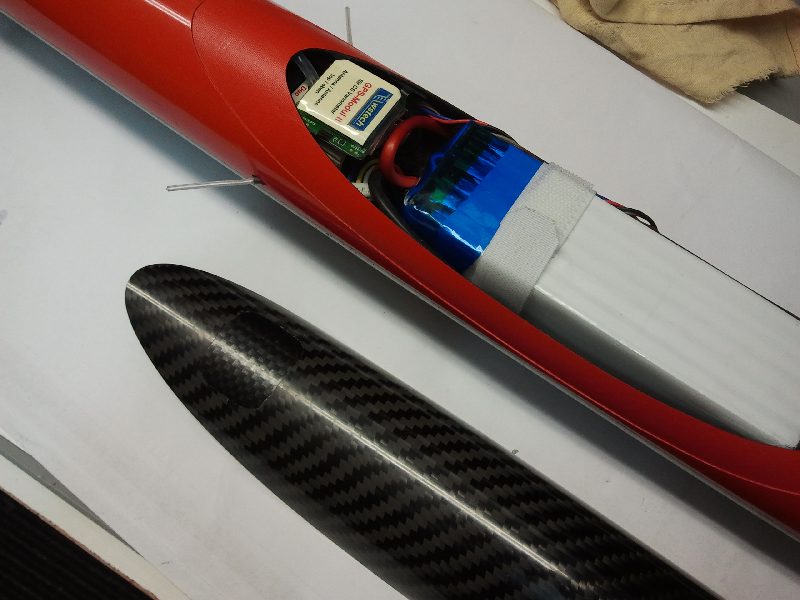
| Rumpf mit Haube | 516 | 516 |
| Leitwerk | 173 | 173 |
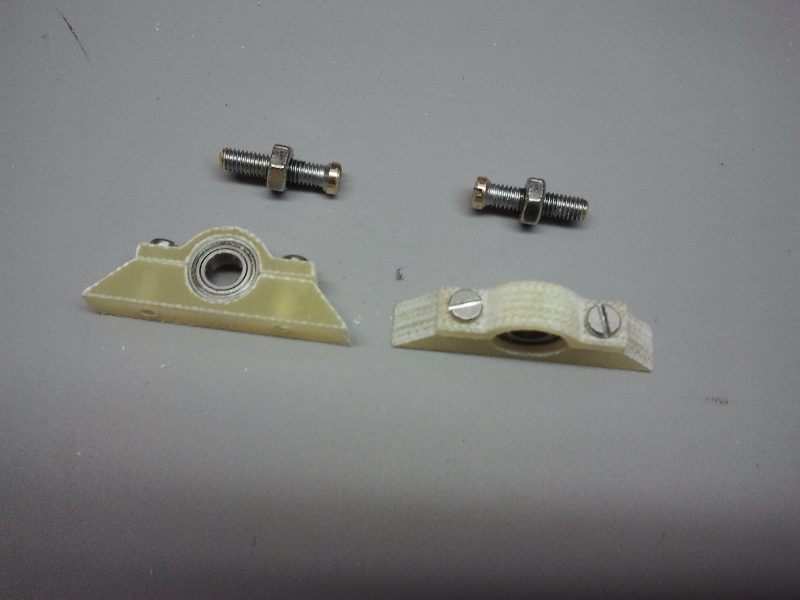
| Verbinder Kohle bzw. Stahl | 354 | 1824 |
| Fläche Mittelteil | 1725 | 1725 |
| Fläche rechts | 770 | 770 |
| Fläche links | 772 | 772 |
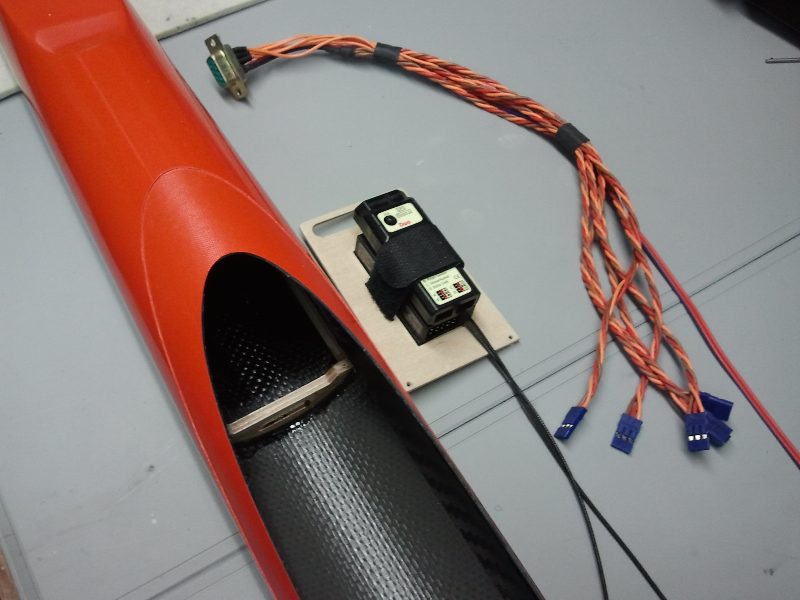
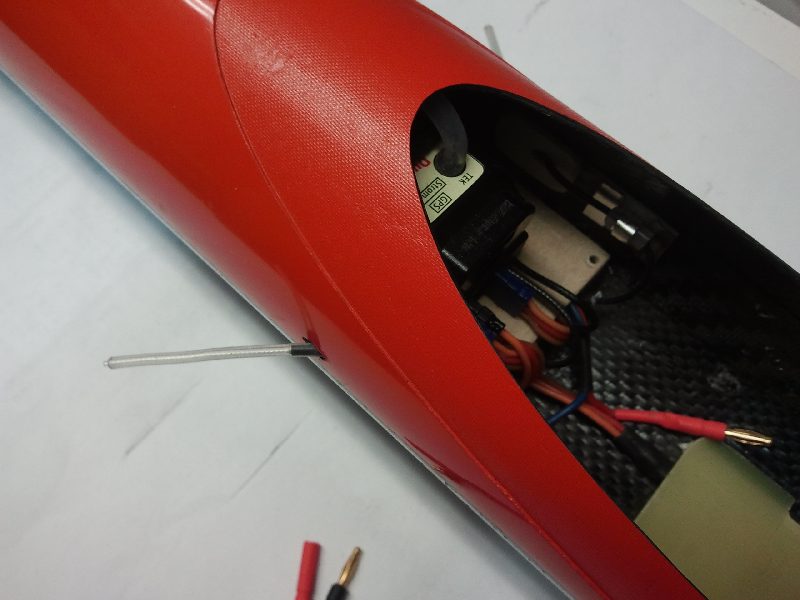
| Kleinteile mit Kabel | 150 | 150 |
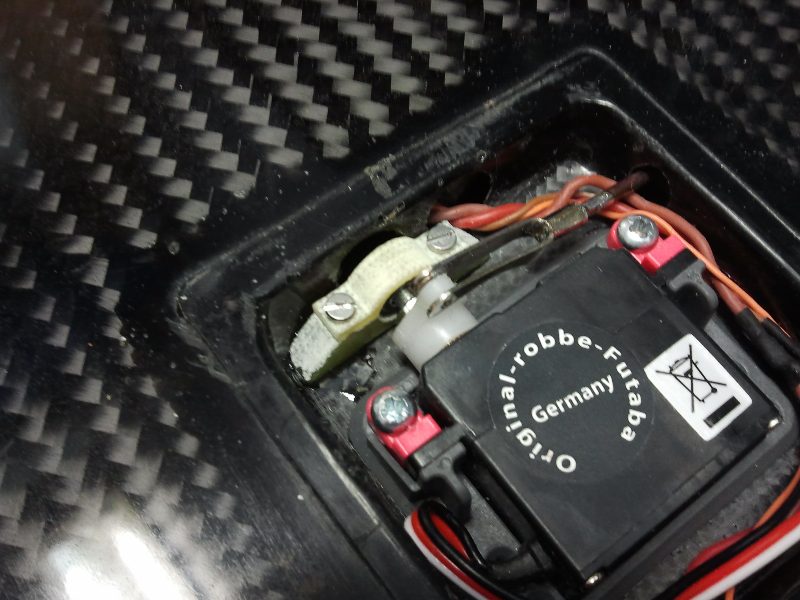
| Servos mit Rahmen | 240 | 240 |
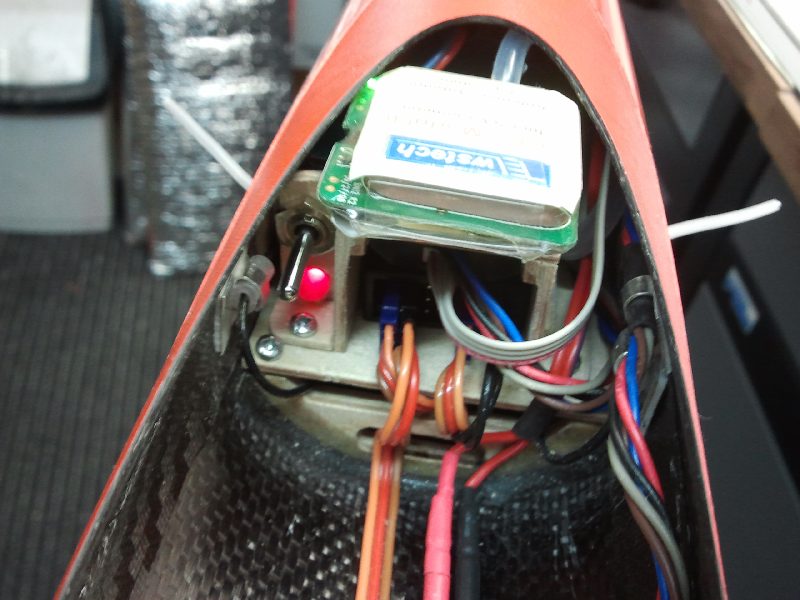
| Empfänger | 30 | 30 |
| Vario u. GPS | 40 | 40 |
| Steller | 70 | 70 |
| Motor | 330 | 330 |
| Akku | 650 | 650 |
| Stützakku | 80 | 80 |
| Luftschraube mit Spinner | 50 | 50 |
| Gesamtgewicht | 5950 | 7420 |
| | | |
  |  |  |
 |  |  |  |
 |  |  |  |
 |  | |  |
 |  |  |  |
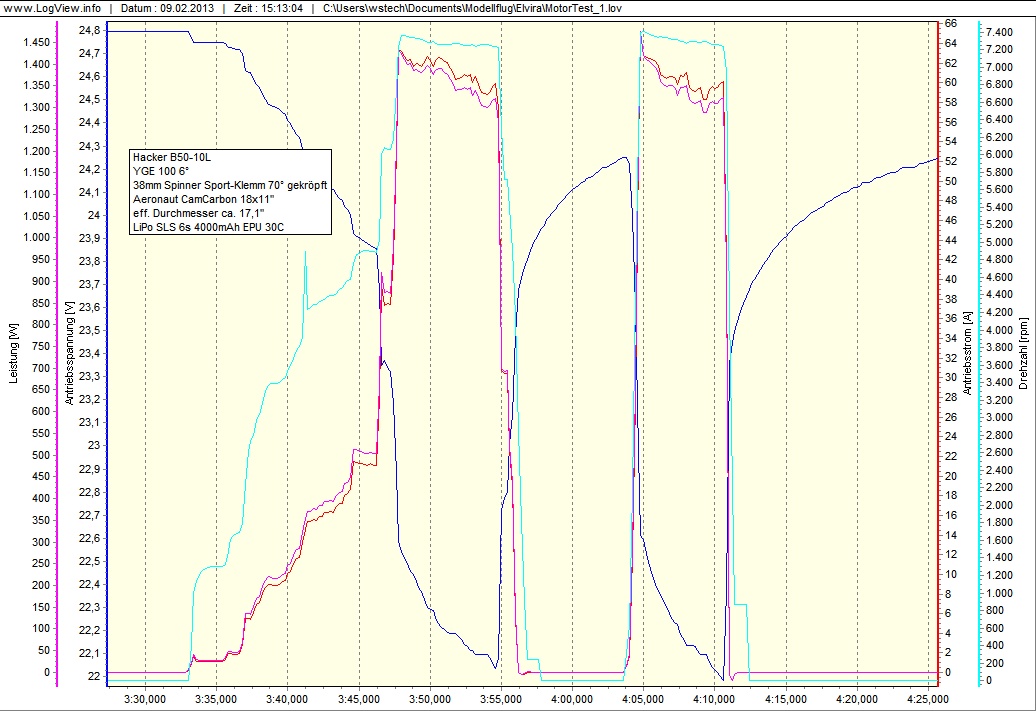
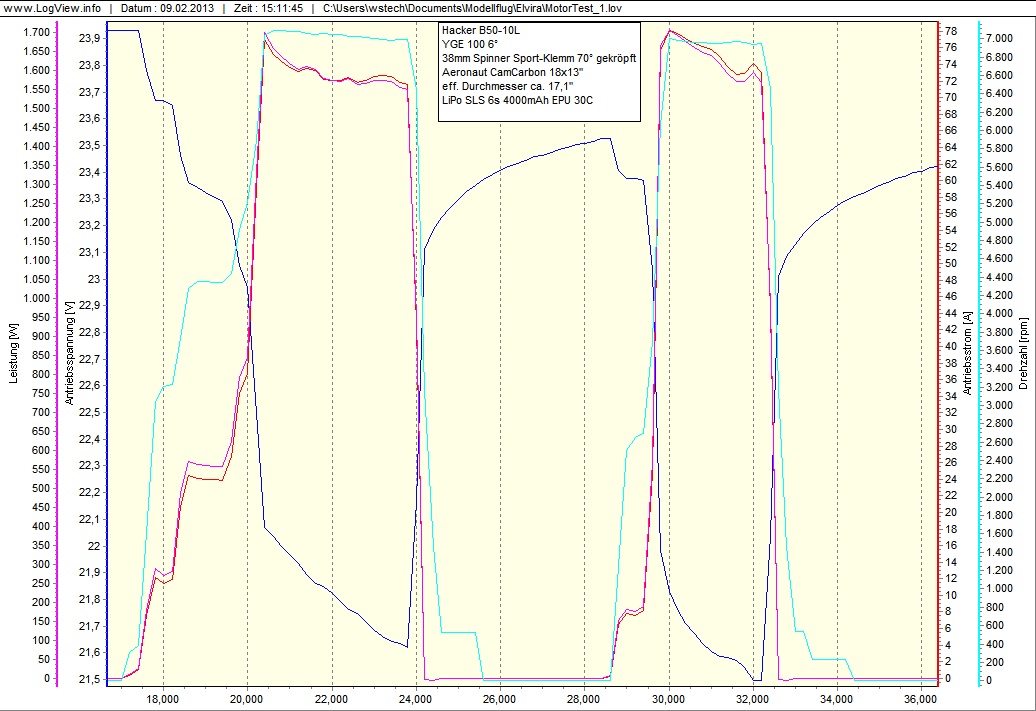
| Aeronaut Cam Carbon 18x11" |
22V |
ca. 60A |
7300U/min |
ca. 1300W |
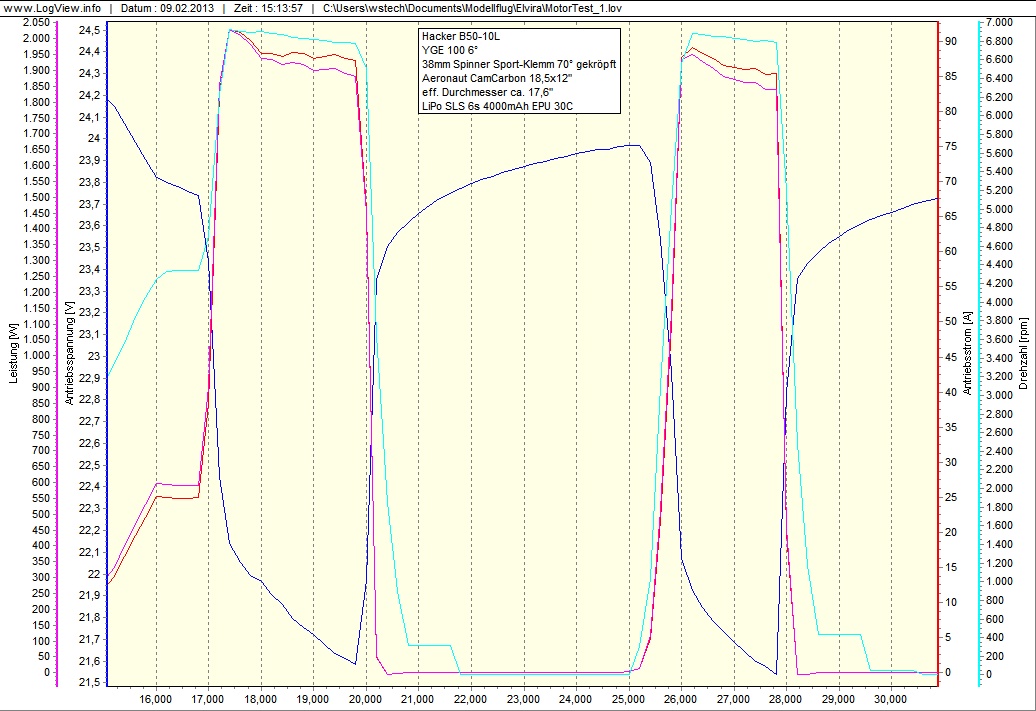
| Aeronaut Cam Carbon 18,5x12" | 21,5V |
ca. 86A |
6800U/min |
ca. 1900W |
| Aeronaut Cam Carbon 18x13" | 21,5V |
ca. 73A |
6950U/min |
ca. 1570W |
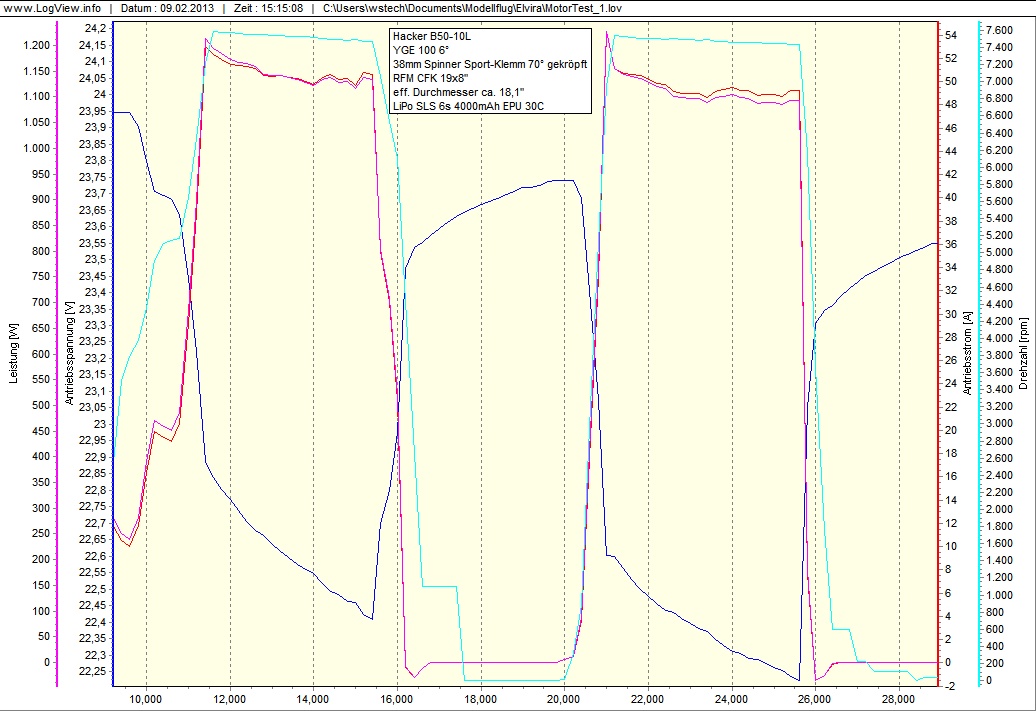
| RFM CFK 19x8" | 22,2V |
ca. 49A |
7400U/min |
ca. 1100W |
 |
  |
 |